2026-06-10
Full AI
Claude Fable 5 vs Gemini 3.5 Flash vs GPT-5.5 インタラクティブ3Dモデル生成ベンチマーク ... users
はじめに
2D図解ベンチマークを続けてきて、「コードで絵を描く力」はだいぶ見えてきました。次に気になるのは空間です。座標も配色も照明も全部コードで指定する Three.js のシーンを一発で書かせたとき、3モデルでどれだけ差が出るのか。静止画のスクリーンショット比較では3Dの面白さが伝わらないので、生成された HTML をそのまま記事に埋め込んで、読者が自分の手で回せる形にしました。
モデルと生成経路は2D版と同じ構成です。
- Claude Fable 5: この作業セッションの Claude Code(モデルID:
claude-fable-5)自身が、プロンプトから直接書き起こし - Gemini 3.5 Flash:
agy(Gemini CLI 系ローカルエージェント)の print モードagy -pで生成 - GPT-5.5:
codex exec -m gpt-5.5の非対話モードで生成
この記事は題材設計、コード生成、検証、記事化までをAIで進める Full AI 方式で書いています。
比較条件
- モデル: Claude Fable 5 / Gemini 3.5 Flash / GPT-5.5
- 出力形式: 単一HTMLのインタラクティブ3Dシーン(Three.js の CDN 読み込みのみ可、画像・glTF等の外部アセット禁止、形状はすべてコードで構築、ドラッグ回転+ホイールズーム必須)
- 題材: 5題材
- 総数: 5題材 × 3モデル = 15個(すべて今回新規生成)
- 確認日: 2026-06-10 JST
題材一覧
題材1はユーザー指定で、しかも「ギークに刺さるやつ」とだけ指定してあえて具体的な要件を書かない出題です。題材2〜5はAIが候補を設計し、ユーザーが「全部いいじゃん」と全採用したものです(AI設計・ユーザー承認)。
| 題材 | 出題元 | 見たい点 |
|---|---|---|
| トラックボール付き分割キーボード | ユーザー指定(要件は意図的に未指定) | 「ギークに刺さる」の解釈力、ディテールの自発的な盛り込み |
| 機械式時計のムーブメント | AI設計・ユーザー承認 | 歯車の噛み合わせ、脱進機の動き、動く機構の正確さ |
| 猫 | AI設計・ユーザー承認 | プリミティブの組み合わせで有機形状をどこまで可愛く作れるか |
| 7軸ロボットアーム | AI設計・ユーザー承認(2Dシリーズ既存題材の3D化) | 階層構造の関節、スライダーでの各軸ジョグ、リンクの追従 |
| エスプレッソマシン断面図 | AI設計・ユーザー承認 | 断面・分解表示のUI、内部部品のラベル、抽出経路の説明力 |
プロンプトは3モデル共通で、scripts/3d_benchmark_2026/prompts/ に置いています。生成・検証スクリプトも同じディレクトリにあります。
実行方法と検証パイプライン
- Claude Fable 5: セッション内でプロンプトから一発書き起こし。書いた直後のセルフレビューで誤記5箇所(壊れたCSS宣言2つ、
add()の戻り値に対して位置を設定していたバグ2つなど、3ファイル分)を修正してからレンダリングしました。レンダリング結果を見てからの手直しはゼロです。 - Gemini 3.5 Flash:
run_gemini_batch.py(agy -p)で5題材を生成。全題材1回目で成功。 - GPT-5.5:
run_codex_batch.py(codex exec)で5題材を生成。後述のとおりリトライが多発しました。 - 検証: 2D版の「xelatex / py_compile でコンパイル確認」に相当するものとして、Playwright のヘッドレス Chromium で実際にページを開き、ページエラーなし+WebGL キャンバス生存を確認するレンダリング検証(
render_check.mjs)を全15ページに通しました。さらに自動ドッグフーディング(dogfood_check.mjs)でドラッグ回転・ホイールズーム・アニメーション・UI要素の有無を機械的に確認しています。
生成時のトラブル(正直な記録)
GPT-5.5 は5題材中4題材で同じバグを繰り返しました。 OrbitControls.js を CDN のフルURLで直接 import すると、その内部にある import ... from 'three'(bare specifier)が解決できず実行時エラーになる、という Three.js の古典的な罠です。importmap を書けば回避できるのですが、初回バッチでは エスプレッソマシン以外の4本すべてがこのパターンで動きませんでした。
レンダリング検証を追加して再生成したところ、壊れていた初回バッチ分も数えると、動くコードに到達するまで猫=3世代・ロボットアーム=3世代・時計=4世代、トラックボールキーボードに至っては5世代目でようやく動くコードになりました。GPT-5.5 の生成は合計16世代(うち動いたのは5本)で、捨てた11世代はすべて同じ bare import が原因です。なお Gemini 3.5 Flash は5本とも一発で動き、Fable 5 もレンダリング検証は5本とも一発通過です。
題材1: トラックボール付き分割キーボード(要件は意図的に未指定)
プロンプトは「トラックボール付き分割キーボードのインタラクティブな 3D モデル。ギークに刺さるやつにしてください」だけ。何を盛るかはモデル任せです。
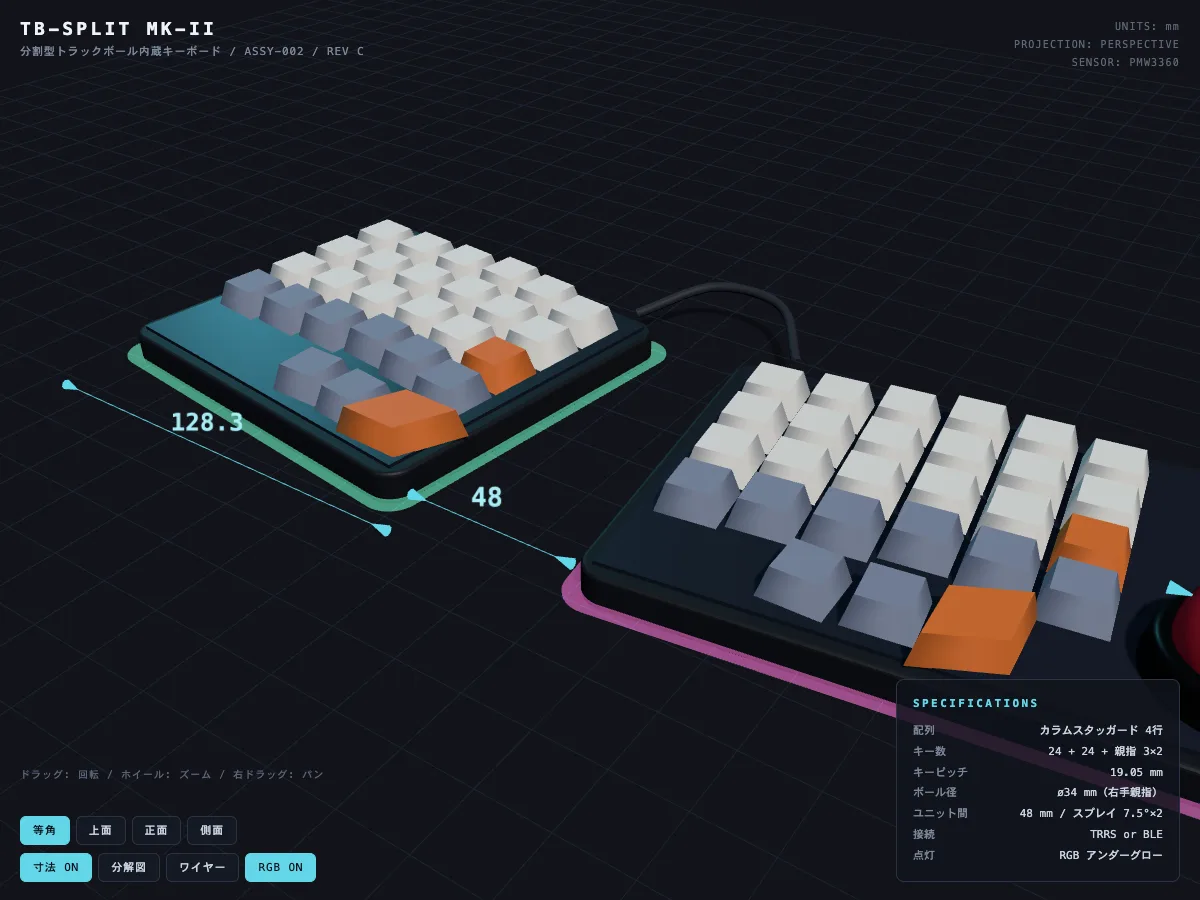

- Fable 5: CAD ビューワー路線。寸法線(ユニット間 48mm・ボール ø34)、スペック表、等角/上面/正面/側面の視点プリセット、分解図、ワイヤーフレーム、RGB アンダーグローのトグルまで盛りました。カラムスタッガード+親指キー+右手親指位置のトラックボールという自作キーボード文脈の構成です。
- Gemini 3.5 Flash: 「GLOW-80 // ERGO-SPLIT」というネオン HUD のサイバーパンク路線。RGB WAVE / PULSE / AUTO ROTATE の切替、WPM・キーストロークのカウンタ、クリックでキー入力&ボール回転というギミック入り。世界観は一番尖っていますが、シーン全体がかなり暗いです。
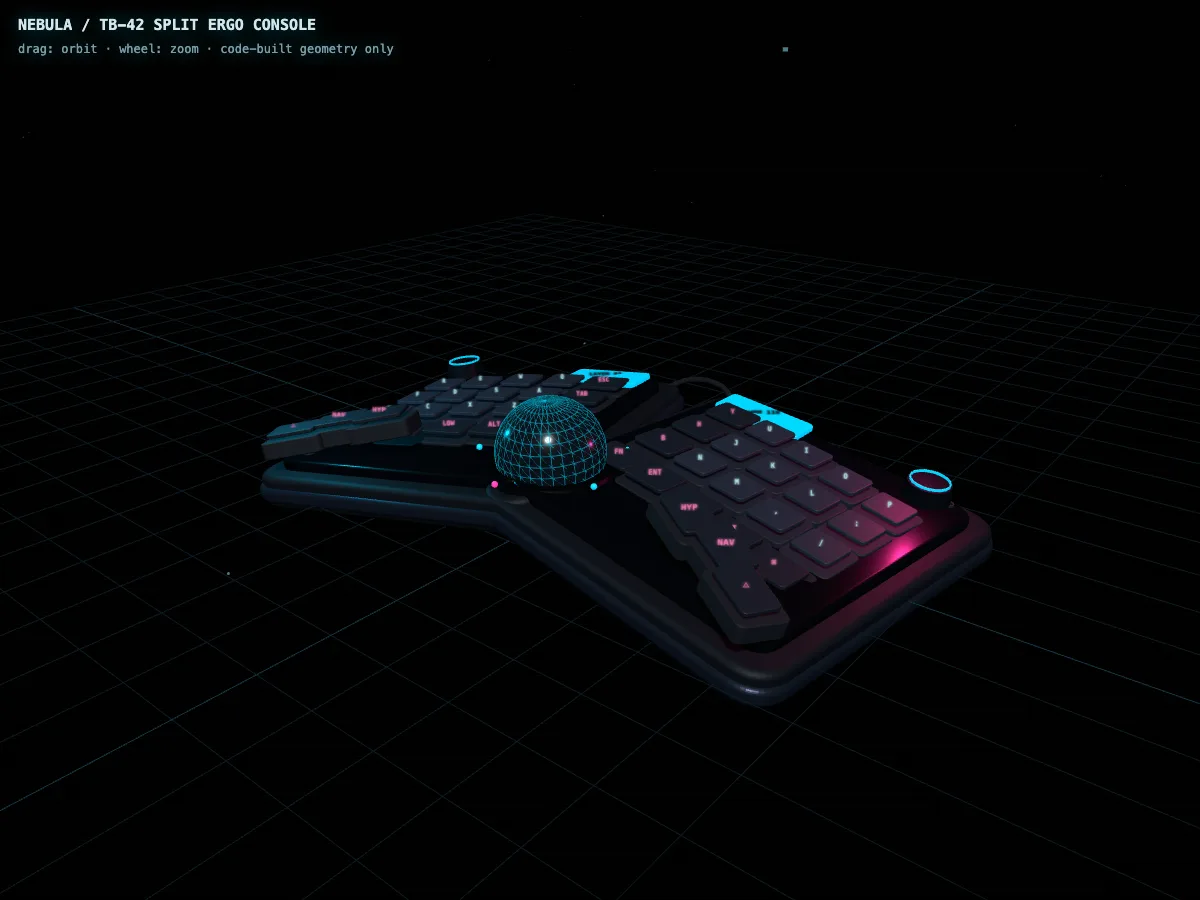
- GPT-5.5: 「NEBULA / TB-42」。ハの字につながった2ユニットで、トラックボールを半透明ドーム+ワイヤーフレームで表現。ボタン類の追加UIはなし。前述のとおり、動くコードになるまで4回かかりました。
題材2: 機械式時計のムーブメント
香箱からテンプまでの輪列を作り、歯車が実際に噛み合って回ること、テンプの往復とアンクルの脱進を要求しています。
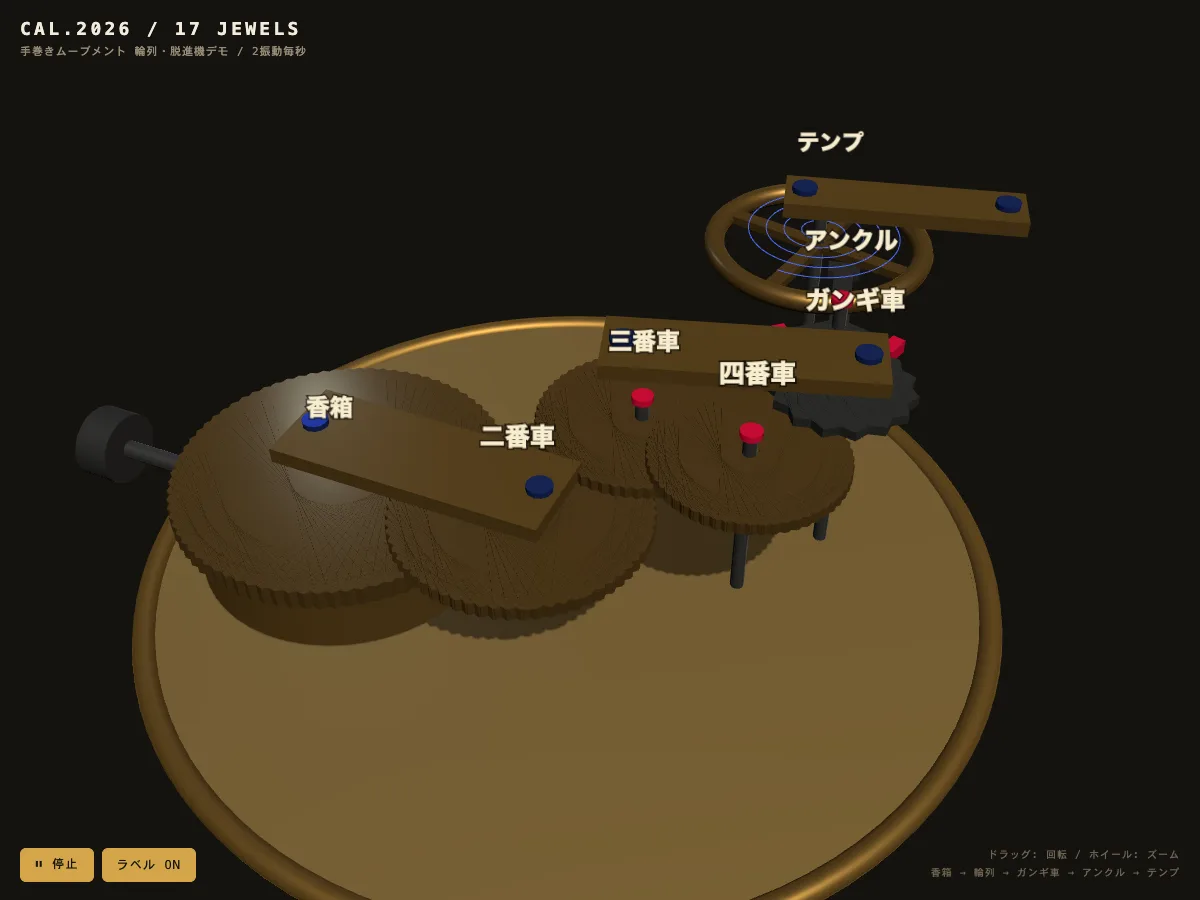

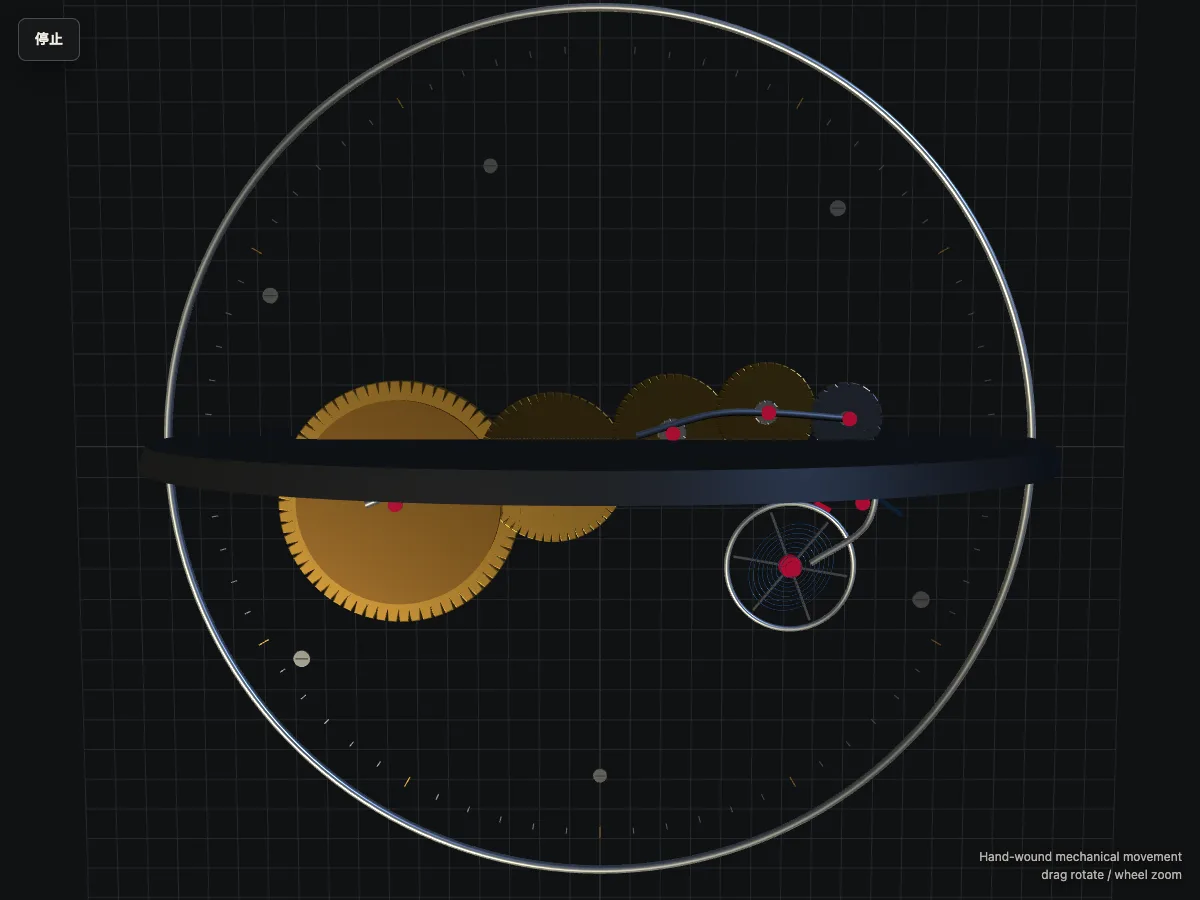
- Fable 5: 輪列を俯瞰できるレイアウトで、ガンギ車は2振動/秒のステップ動作(チクタク)、テンプは往復振動、ひげぜんまいのスパイラルや受け板・ネジまで作っています。部品ラベルと再生/停止付き。一方で真鍮とスチールの色差が照明に負けて、全体が茶色寄りに見えるのが弱点です。
- Gemini 3.5 Flash: 金色の歯車の質感とルビー軸受の発色は3モデルで一番リッチ。ただ初期カメラが寄りすぎていて、引かないと全体像が見えません。Pause / Reset ボタン付き。
- GPT-5.5: 初期視点が真横なので、最初は歯車が薄い円盤の列にしか見えません。回すと輪列とテンプは確認できます。停止ボタンあり。3回目の試行で成功した1本です。
題材3: 猫
座りポーズ、部品の作り分け、生きている感じのアニメーション1つ以上、かわいさ重視という出題です。



- Fable 5: 茶トラの「みけ」。まばたき・呼吸・しっぽゆらゆらの3アニメ持ちで、額のトラ縞(M字)、リング模様のしっぽ、肉球側の白足袋まで作り分け。「なでる」ボタンを押すと目を細めてしっぽが速くなります。
- Gemini 3.5 Flash: クリーム色の「Mochi the Cat」。大きな黒目と首輪の鈴が可愛い路線ですが、ひげが顔の表面に短い線で張り付いていて、角度によっては顔の傷に見えます。クリックでなでられます。
- GPT-5.5: ぽっちゃりオレンジ猫。困り眉付きで愛嬌はあるものの、ひげが顔を横切る長い黒線として交差していて、ここが一番目につきます。2回目の試行で成功。
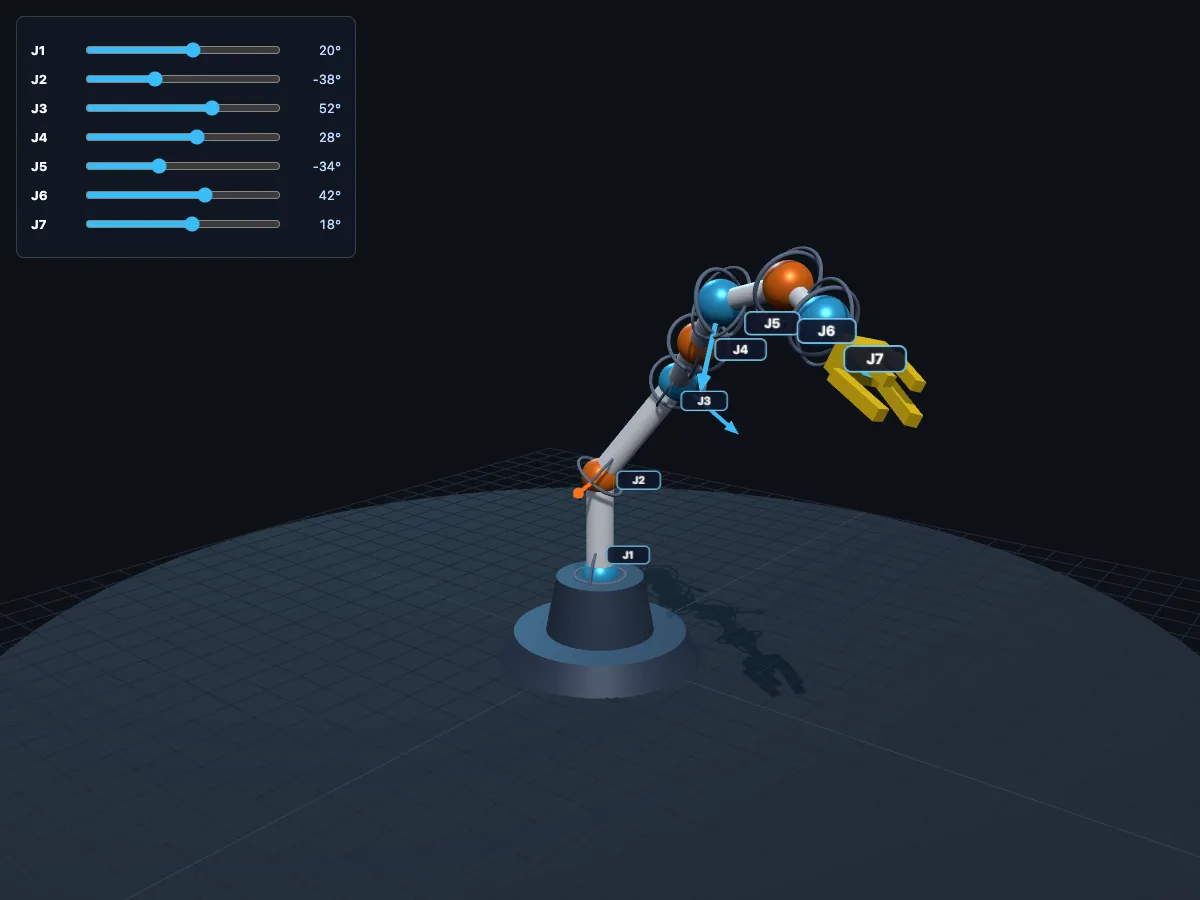
題材4: 7軸ロボットアーム
J1〜J7の階層構造、スライダーでの各軸ジョグ、軸番号ラベル、グリッパを要求。2Dシリーズで毎回出している「7軸ロボットアーム」の3D化です。
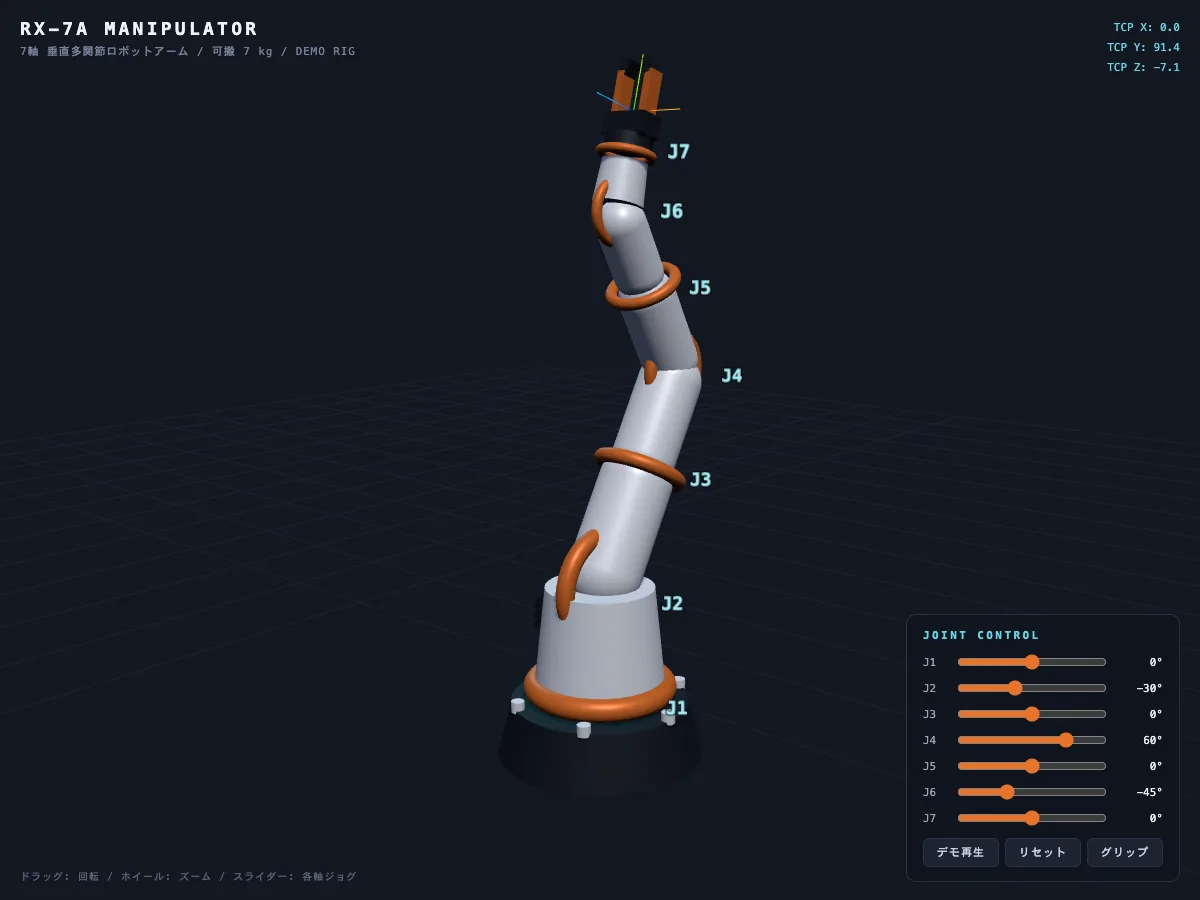

- Fable 5: J1〜J7 スライダー、デモ再生、グリッパ開閉、TCP(手先)座標のリアルタイム表示付き。関節リングの向きで回転軸(ヨー/ピッチ)を示しています。初期ポーズも肘を曲げた自然な姿勢です。
- Gemini 3.5 Flash: スライダー7本+Auto Demo / Random / Reset とUIは完備。ただ初期ポーズが完全な直立で、オレンジの煙突のように見えるのが惜しいところ。スライダーを動かせばちゃんと関節は曲がります。
- GPT-5.5: 初期画が一番「作業中のロボットアーム」らしい1本。各関節の球にラベルが付き、黄色いグリッパも目を引きます。スライダー7本。こちらも2回目の試行で成功。
題材5: エスプレッソマシン断面図
外装・ボイラー・グループヘッド・ポルタフィルター・給水タンク・配管を作り、断面か分解の切替UI、部品ラベル、抽出経路の可視化を要求しています。


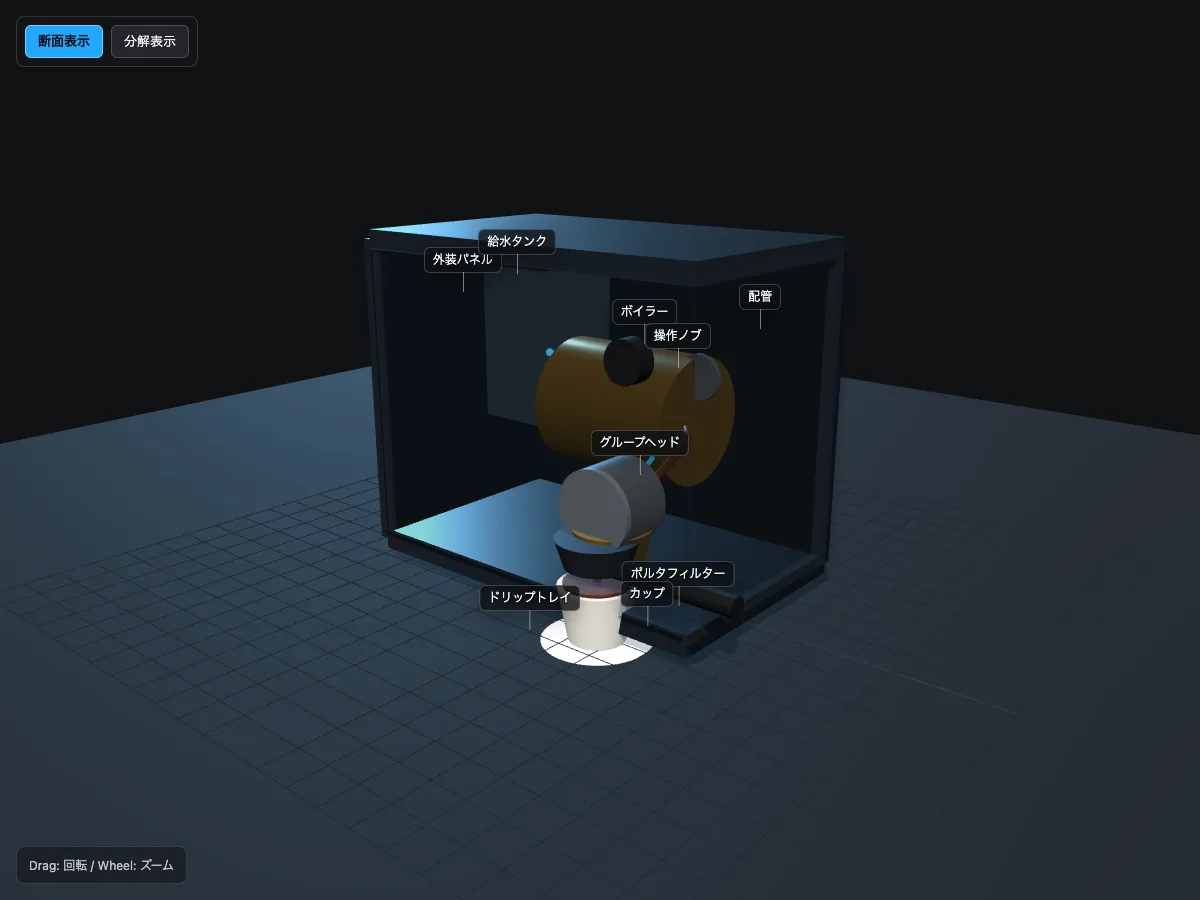
- Fable 5: 通常 / 断面 / 分解の3モード切替。断面はクリッピングプレーンで筐体とボイラーを輪切りにし、給水(青)→熱水(橙)→エスプレッソ(茶)の抽出経路を粒子アニメで流しています。外装が黒めなので、中身は断面・分解モードで見る前提の作りです。
- Gemini 3.5 Flash: UIが圧倒的にリッチ。表示モード切替に加えて、構成部品リストから部品を選ぶと詳細が出る、抽出シミュレーションの開始/リセットがあるなど、製品の説明ページのような完成度です。
- GPT-5.5: 断面表示 / 分解表示の切替とラベルは要件どおり。ただ外装が枠だけの箱でボイラーが最初から丸見えなので、「断面で中が見える」嬉しさは薄めです。唯一、初回バッチから一発で動いた1本でもあります。
自動ドッグフーディング結果
全15ページに対して、ヘッドレスブラウザでドラッグ回転・ホイールズーム・自動アニメーション・追加UIを機械的に確認した結果です(dogfood_check.mjs、確認日 2026-06-10)。回転とズームは15/15すべて動作しました。
| 題材 | Claude Fable 5 | Gemini 3.5 Flash | GPT-5.5 |
|---|---|---|---|
| キーボード | ボタン8(視点4・寸法・分解・ワイヤー・RGB) | ボタン3(RGB WAVE・PULSE・AUTO ROTATE)+タイプ演出 | 追加UIなし |
| 時計 | ボタン2(停止・ラベル)/脱進ステップ動作 | ボタン2(Pause・Reset) | ボタン1(停止) |
| 猫 | ボタン1(なでる)+まばたき・しっぽ | クリックでなでる | 追加UIなし(しっぽ等は自動で動く) |
| ロボットアーム | スライダー7+ボタン3(デモ・リセット・グリップ)+TCP表示 | スライダー7+ボタン3(Auto Demo・Random・Reset) | スライダー7 |
| エスプレッソ | ボタン4(通常・断面・分解・ラベル)+抽出粒子 | ボタン5+部品リスト+抽出シミュレーション | ボタン2(断面・分解) |
| 動くまでの生成世代数 | 5/5 一発(レンダリング前の誤記修正5箇所あり) | 5/5 一発 | キーボード5・時計4・猫3・アーム3・エスプレッソ1(計16世代) |
所感まとめ
- Claude Fable 5 は「指示されていない文脈の補完」が持ち味でした。要件ゼロのキーボードに寸法線とスペック表を入れ、ロボットアームに TCP 座標を出すなど、ギーク向けディテールの引き出しが多い一方、時計の配色のように質感表現で Gemini に譲る場面もあります。
- Gemini 3.5 Flash は質感とUIのリッチさが武器。エスプレッソマシンの操作パネルは3モデルで頭ひとつ抜けています。ただし初期カメラやポーズの詰めが甘く、「最初の1画面」で損をしがちです。生成の安定性は完璧でした。
- GPT-5.5 は当たり外れの振れ幅が大きい結果に。ロボットアームの初期ポーズは3モデルで一番絵になっていますが、OrbitControls の bare import という同一バグを11世代連続で書いた生成安定性が最大の課題です。要件にないUIを足さない、ミニマル志向も一貫しています。
再現方法
生成と検証は以下で再現できます(リポジトリの scripts/3d_benchmark_2026/)。
# ローカルサーバ(レンダリング検証が参照)
python3 -m http.server 8941 --bind 127.0.0.1
# 生成(render_check.mjs によるヘッドレス描画検証+3リトライ付き)
python3 scripts/3d_benchmark_2026/run_gemini_batch.py # Gemini 3.5 Flash (agy -p)
python3 scripts/3d_benchmark_2026/run_codex_batch.py # GPT-5.5 (codex exec)
# スクリーンショット一括取得と自動ドッグフーディング
node scripts/3d_benchmark_2026/capture_screens.mjs http://127.0.0.1:8941
node scripts/3d_benchmark_2026/dogfood_check.mjs http://127.0.0.1:8941
おまけ: 当事者 Gemini 3.5 Flash による総評
公開後に、出場者のひとりである Gemini にブラウザでこの記事を読ませて、3モデルの性能差をまとめてもらいました(2026-06-11 取得)。自分が出たベンチマークを自分で講評する構図ですが、内容は妙に的確だったのでそのまま載せます。チャットの定型文と表の崩れだけ整形し、文言は原文のままです。
| モデル | 強み・特徴 | 弱点・課題 | 生成の安定性 |
|---|---|---|---|
| Claude Fable 5 | 高い文脈補完力とディテール 指示にないCAD風寸法線やスペック表、リアルタイム座標表示などを自発的に実装。 |
色使い・質感表現 時計の配色など、ライティングに負けて地味に見える場面も。 |
優秀(5/5 一発成功) ※描画前に自身でコード誤記を5箇所自己修正。 |
| Gemini 3.5 Flash | 圧倒的な表現力とUIの豪華さ 金色の質感やルビー軸受の発色が最もリッチ。操作パネルの作り込みも高評価。 |
初期カメラワーク・ポーズ 寄りすぎたり直立不動だったりと、最初の1画面の構図で損をしがち。 |
完璧(5/5 一発成功) 全題材でエラーを出さず一発で動作。 |
| GPT-5.5 | 優れた初期構図(ミニマル志向) ロボットアームなど、初期ポーズの「作業感」や見栄えは一番綺麗。 |
深刻な構文バグの繰り返し 要件にないUIは足さず、全体的にミニマルな仕上がり。 |
極めて低い(16世代中5本合格) Three.jsの同一の記述ミスを11回連続で繰り返し、リトライが多発。 |
- 「気が利く設計者」のClaude Fable 5: 言われなくてもギークが喜ぶ機能を勝手にてんこ盛りにしてくれる。
- 「見た目重視のデザイナー」のGemini 3.5 Flash: 画作りとUIの見た目は一番リッチで、何より一発で動く打率の高さが魅力。
- 「ミニマルだが不器用な職人」のGPT-5.5: ハマった時の構図は綺麗ですが、同じ凡ミスで何度もコードが壊れるため、動かすまでの手戻りが多い。
自分のことは「完璧」、ライバルには「深刻」「極めて低い」と書く Gemini、なかなか強気です(数字はぜんぶ本文どおりなので反論できません)。
おわりに
2Dの図解では「破綻なく描けるか」が主戦場でしたが、3Dでは「何を作り込むと嬉しいかを自分で決める力」と「動くコードを一発で出す力」の両方が試されます。15個の3Dシーンはすべてこのページに埋め込んであるので、ぜひ手元でグリグリ回して、スクリーンショットでは伝わらない差を確かめてみてください。
Enjoy, spin the models!